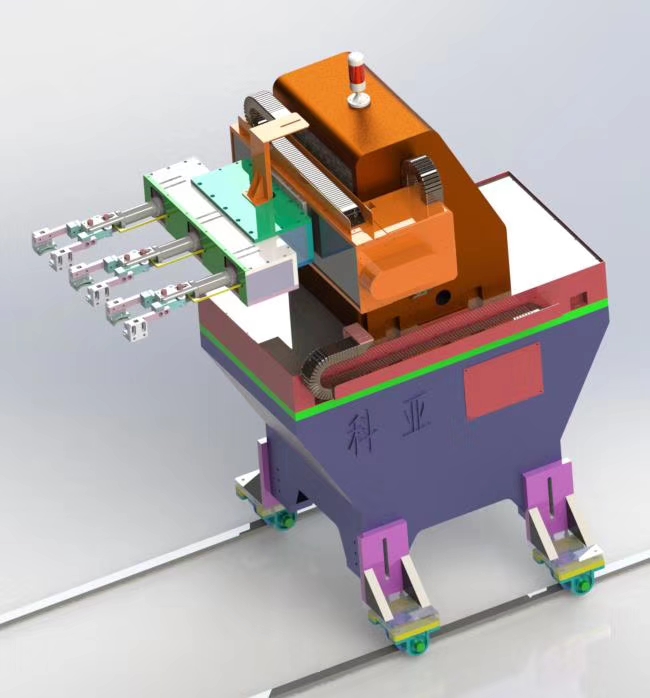
用电力操作的冲床机械手和一般机械手相比,电动机械手增加了伸缩量,使机械手能充分利用热室的空间,因而在同样的工作深度下,主动臂可以做得短些,使热室操作区空间可以缩短。电动机械手操作比普通机械手方便,易于观察热室中的工作状况。冲床机械手主要由手部和运动机构组成。手部是用来抓持工件(或工具)的部件,根据被抓持物件的形状、尺寸、重量、材料和作业要求而有多种结构形式,如夹持型、托持型和吸附型等。运动机构,使手部完成各种转动(摆动)、移动或复合运动来实现规定的动作,改变被抓持物件的位置和姿势。
在信号传输较远的情况下,可选用屏蔽电缆;绝大部分的冲床机械手的PLC控制系统故障率是由外接故障引起的,特别是一些机械型的、的故障率往往比PLC本身故障率高得多,所以在设计控制系统时应采取相应的措施,如选用高性能的接近开关来代替机械型的行程限位开关等措施。